


 Menu
Menu

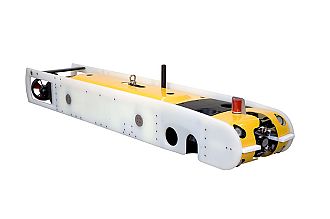
The Sabertooth is a hybrid AUV/ROV capable of working in deep water either as an autonomous vehicle, or via a tether. Its power, tether-free operation and its 360° hovering manoeuvrability make the Sabertooth an ideal option for autonomous inspection or maintenance and repair tasks as well as offshore survey work.
The Sabertooth is available as a single hull or double hull vehicle capable of operating at depths of 1200m or up to 3000m for the double hull vehicle.
The double hull Sabertooth can be based at a remote location docking station ready to be launched on pre-programmed or man-controlled missions, including inspection, repair and maintenance, research tasks and environmental monitoring. Tooling packages can be stored at the docking station, batteries recharged and data transferred via satellite or cable to shore.
The vehicle can reside in the docking station for more than six months without maintenance, reducing the cost of surface vessels.
A hybrid vehicle that can work over a long excursion range either autonomously or manually via a tether.

A powerful vehicle with six thrusters and a number of advanced autopilot features provide six degrees of freedom, station keeping and obstacle avoidance.

A range of tooling and sensor packages are available for the Sabertooth. These tooling packages can also be stored in the underwater docking station.
The surface equipment for the Sabertooth includes a surface control unit comprising a computer with the graphical interface software displayed on a monitor and a fibre optic receiver for communication between the surface and a tethered vehicle.
Additional operator equipment includes a keyboard and mouse.
A WLAN Access Point with an antenna is used when the vehicle is in autonomous mode.
A battery charger fitted in a mobile case can recharge the vehicle at the surface. The unit provides a charging power of 3.3 kW (lower power when the input voltage is below 200 VAC) with an input power of 100-264 VAC (single phase).
An automated tension control winch is used in conjunction with a tether when working in manual mode.
The operator's monitor runs the graphical user interface (GUI) for vehicle power and control, system diagnostics including remote access for technical support, create mission plans, and display data and video transmitted via the Fibre Optic receiver and tether for manual mode or via the WLAN antenna for autonomous mode.
The Sabertooth vehicles are rated to a depth of 1200 m. The Double Hull version also has a 3000 m depth rated option. Both vehicles are fitted with six thrusters; four SM4s and two SM9s on the Single Hull whereas there are six SM9s on the Double Hull.
The vehicles are fitted with an electronics pod with a Phins INS incorporated, LED lights, cameras, a depth sensor, sonar options, a Doppler Velocity Log (DVL), a Sound Velocity Profiler (SVP) and a communication unit.
Advanced autopilot features are heading, depth, pitch, roll, stabilisation, altitude, station keeping, vector transition, obstacle avoidance and sonar target tracking.

Specification | Sabertooth Single Hull |
Depth Rating (msw) | 1200 |
Dimensions |
|
Length (mm) | 3800 |
Height (mm) | 500 |
Width (mm) | 700 |
Weight in air (kg) | 700 |
Payload (kg) | - |
Thrust |
|
Forward (kgf) | 100 |
Lateral (kgf) | 40 |
Vertical (kgf) | 80 |
Speed (knots) | 5 |
Power |
|
Power input phases | 3 |
Voltage (VAC) | 380/480 |
Option | 690 |
Frequency (Hz) | 50/60 |
Battery Capacity (kWh) | 10 |
Endurance (km@2kts) | ~40 |

Acoustic navigation and communications instrument options.

Battery-operated, Xenon emergency strobe used to locate vehicle.

Hydro-Lek five-function manipulator. (HLK-HD5)

Doppler velocity log for station keeping.

Profiling Sonar for obstacle avoidance during autonomous operations. (881L)

Bathymetric system for side scan imagery, sub-bottom profiles and bathymetric data.

Low light camera options available.

High resolution colour or monochrome camera for vehicle. (OE14-110)

Cleaning brush incorporating a heavy duty brush plus an SM7 thruster motor.

Winch options available including automatic tension control for the fibre optic winch.
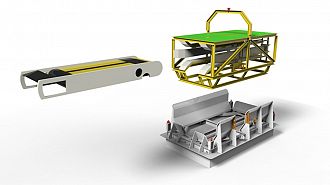
Underwater docking station rated to a depth of 3000 m providing a battery recharging facility and protection for the vehicle for over six months.
The world’s first resident subsea contract has been awarded to Modus by Equinor Energy for the autonomous deployment of a Saab Sabertooth underwater robot, which will remain docked on the seabed between tasks.
Read more
Future Lab, the innovation pavilion at Goodwood’s Festival of Speed, 23 – 26 June 2022, is featuring Saab Seaeye’s pioneering underwater robotic technology.
Read more
Two Saab Sabertooth robots will go under the Antarctic ice in the hunt for the wreck of the Endurance, sunk during Shackleton’s ill-fated expedition in 1915.
Read more


 Twitter
Twitter Linkedin
Linkedin